
Robotik und Automatisierung
Robotik ist eine der strategischen Technologien des 21. Jahrhunderts, welche Lösungen für viele gesellschaftlichen Herausforderungen bereit stellen wird und die Wettbewerbsfähigkeit von Schlüsselindustrien gewährleisten wird.


 wurde auf der virtuellen Ergebniskonferenz des Hightech-Forums am 21. April 2021 vorgestellt. Videoformat beginnt ab 1:08:35")
Durch unsere integrierten themenübergreifenden Forschungsaktivitäten innerhalb KCIST und den KIT-Disziplinen, betreiben wir Forschung und entwickeln wir Robotertechniken für Dienstanwendungen/Service applications , Manufaktur, Mobilität und Gesundheitswesen, um die Lebensqualität von allen zu verbessern.
Unsere wichtigsten Forschungsaktivitäten reichen von assistierender Robotik, kollaborativer Robotik und kognitiver Robotik zu Roboter-Wahrnehmung, Robotorprogrammierung, durch Demonstrationen, Greifen, Fingerfertigkeit und Mobile Manipulation zu industrieller Robotik, Prozesskontrolle und Automation. Unser Ziel ist es Robotiksysteme mit erweiterten Fähigkeiten im Bereich intelligentes Abtasten, erweiterte Bewegungskontrolle, sichere Interaktion, intuitives Programmieren und Leistung zu entwickeln.
Wichtige Projekte:
Das Ziel von SecondHands ist es, einen Roboter zu entwerfen, der einem Wartungstechniker auf proaktive Weise Hilfe bieten kann.
To the Project-Website
Im Transregionalen Sonderforschungsbereich Invasives Computing (kurz: InvasIC) untersuchen wir ein neuartiges Paradigma für den Entwurf und die ressourcenbewusste Programmierung zukünftiger paralleler Rechnersysteme.
Weitere Projekte finden Sie auf der Website unseres Partners
Ereignisse:
| 20. November 2019 | Europäische Woche der Robotik: Tag der offenen Tür bei IAR-H2T und IAR-IPR |
| 21. November 2018 | Europäische Woche der Robotik: Tag der offenen Tür bei IAR-H2T und IAR-IPR, nur auf Deutsch |
| 21. November 2018 | Europäische Woche der Robotik: Tag der offenen Tür bei IAR-H2T und IAR-IPR, nur auf Deutsch |
| 25. bis 28. September 2016 | Internationaler Workshop Robotik im 21. Jahrhundert: Herausforderungen und Versprechungen |
Presseberichte:
| Roboter Armar 6 hört auf Befehle und hilft aus (21.03.2019, anlässlich des Besuchs des Landeshauptmannes von Oberösterreich am KIT) |
| Mobilität zum Anziehen (12.07.2018) |
| Wie Roboter dem Menschen ähnlicher werden (21.03.2018, nur Deutsch) |
| ARMAR-6 in der Presse |
| Ein neuer Open-Source-Datensatz verbindet menschliche Bewegung und Sprache (09.02.2017) |
| Humanoide 2016: Kommen Roboter ohne Gehirn besser zurecht? (17.11.2016, nur Deutsch) |
| Robotik: Selbstlernende Kooperationspartner (29.09.2016) |
| Mensch-Roboter-Interaktion: Die Semantik der menschlichen Handlungen (26.09.2016) |
YouTube-Kanal der Forschungsgruppe Hochleistungs-Humanoide Technologien (H²T)
To the Youtube Channel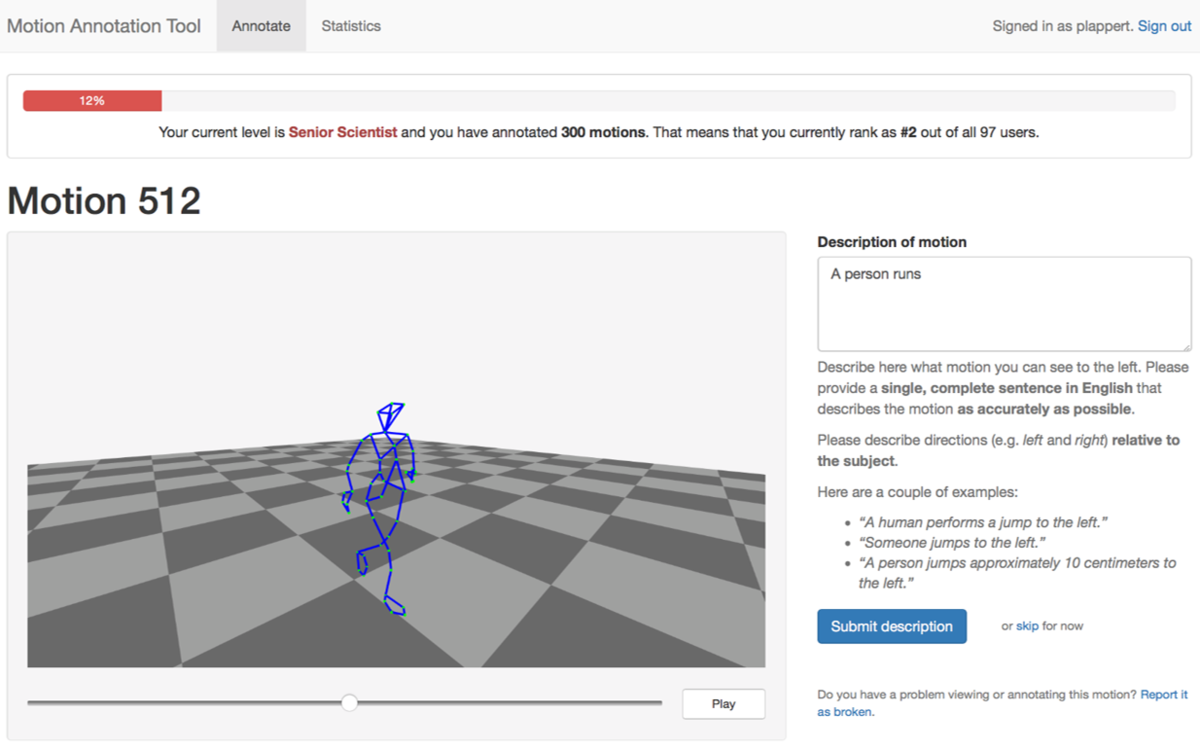
Mit dem Motion-Language-Datensatz des KIT wollen wir einen offenen, groß angelegten Datensatz mit natürlichsprachlichen Annotationen bereitstellen.
Link to the database