
Robotik und Autonome Systeme

Die Forschung zu Robotik und autonomen Systemen am KIT verbindet Tradition und Vision. Sie konzentriert sich auf die Entwicklung von menschenzentrierten Technologien mit noch nie dagewesenen transformativen Auswirkungen auf Gesellschaft und Wirtschaft. Unsere Idee ist technische Systeme Für die Unterstützung von Menschen zu entwickeln, um Lebensqualität und ein längeres selbstbestimmtes Leben im Alter zu sichern, die Qualität und Effizienz in Medizin und Pflege zu steigern sowie die Produktivität in der Automatisierung zu erhöhen. Die Forschungsthemen in diesem Bereich beruhen auf einer langen Tradition in Karlsruhe und auf einzigartigen Synergien zwischen Informatik, Maschinenbau und Elektrotechnik, Sport- und Sozialwissenschaften sowie auf erfolgreichen Kooperationen mit dem Forschungszentrum Informatik (FZI) und dem Fraunhofer IOSB.
Einem systemischen Ansatz folgend, befassen sich die Forschungsaktivitäten mit grundlegenden und anwendungsorientierten Methoden für das ganzheitliche Entwickeln von intelligenten und lernenden Robotern und autonomen Systemen, die in dynamischen Umgebungen agieren, aus Interaktionen und von Menschen lernen, um ihren Autonomiegrad und ihre Anpassungsfähigkeit an neue Situationen zu erhöhen. Diese Systeme reichen von humanoider Assistenzrobotik, medizinischer Robotik, Industrierobotik bis hin zu Produktions- und Logistiksystemen, robotergestützter Automation und intuitiven multimodalen Mensch-Maschine-Schnittstellen. Besonderes Augenmerk wird auf ethische, rechtliche und soziale Implikationen (ELSI) von Robotik und autonomen Systemen gelegt, ein Forschungsschwerpunkt des KIT, der durch das KIT-Zentrum "Mensch und Technik" (MuT) und im KCIST durch mehrere PIs und Interaktion mit MuT abgedeckt wird. Diese Expertise macht das KIT zum richtigen Ort, um Robotik und autonome Systeme voranzubringen und nachhaltigen Fortschritt zu fördern.

 wurde auf der virtuellen Ergebniskonferenz des Hightech-Forums am 21. April 2021 vorgestellt. Videoformat beginnt ab 1:08:35")
Die Aktivitäten in diesem Topic lassen sich in die folgenden Forschungsbereiche unterteilen:
Mensch-Maschine-Interaktion und Kommunikation ▼
Dazu gehört das Verständnis von natürlicher Sprache und multimodaler Interaktion durch die Erfassung und Interpretation von visuellen, akustischen und haptischen Signalen sowie Biosignalen, um eine natürliche und intuitive Mensch-Maschine-Schnittstellen und die Zusammenarbeit zwischen Menschen und Maschinen/Robotern zu ermöglichen. Darüber hinaus umfasst es die Forschung zu Telepräsenzmethoden und AR/VR-Technologien für die Robotersteuerung in abgelegenen und/oder menschfeindlichen Umgebungen sowie in der Medizin.
Humanoide assistive und kollaborative Robotik ▼
Der Fokus liegt auf der Integration von KI, Informatik und Mechatronik für die Entwicklung von menschenzentrierten humanoiden Robotern mit vielseitigen Fähigkeiten und ganzheitlich funktionalen Hardware-Software-Architekturen. Die Forschung zu diesem Thema befasst sich mit der Mechano-Informatik der Robotik, dem geschickten Greifen und der Manipulation, dem Lernen aus menschlicher Beobachtung, aus der Interaktion und Kollaboration mit dem Menschen und aus sensomotorischer Erfahrung.
Wearable Robotik und assistive Technologien ▼
Transfer von Wissen aus der humanoiden Robotik in die Prothetik-, Orthetik- und Exoskelett-Forschung für die Entwicklung symbiotischer Wearable Robots zur Augmentation der motorischen Fähigkeiten des Menschen zu Hause und am Arbeitsplatz und als Kompensation für motorische Einschränkungen. Ein besonderer Fokus liegt dabei auf neuartigen weichen Designs, die mit der menschlichen Körpermorphologie kompatibel sind, und auf neuartigen Schnittstellen am menschlichen Körper für eine intuitive und mühelose Steuerung. Weiterhin wird am Zentrum für Sehgeschädigte (SZS) an der Entwicklung von assistiven Technologien für Menschen mit Sehbehinderungen geforscht.
Medizinische Robotik und Biomedizintechnik ▼
Methoden und Systeme für die minimalinvasive, robotergestützte Chirurgie und die Assistenzsysteme zur Unterstützung von Chirurgen im Operationssaal der Zukunft. Dazu gehören der Entwurf innovativer Systeme für die chirurgische Robotik, die medizinische Bildverarbeitung und Methoden der Interpretation von prä-, intra- und postoperativen heterogenen Informationen in der robotergestützten Chirurgie.
Industrierobotik und Automatisierung ▼
Dies umfasst Anwendungen von Industrierobotern und Automatisierungstechnologien in verschiedenen Anwendungsbereichen wie agile Fertigung und flexibles Handling, Montage und Demontage, intelligente Logistiksysteme, automatisierte bildbasierte Identifikation und Sortierung von Biomaterialien. Darüber hinaus werden Sicherheitskonzepte in industriellen Anlagen durch die Entwicklung von Echtzeit-Trajektoriengenerierungsmethoden und kollisionsfreier Bewegungsplanung untersucht.
Automatisierung der Produktion ▼
Dies beinhaltet die Entwicklung von Methoden und Systemen für eine agile und hochflexible und rekonfigurierbare industrielle Produktion unter Berücksichtigung der Unsicherheit von Produktionsanforderungen und Produkten. Dazu werden neuartige Konzepte zukünftiger Fabriken im Sinne neuartiger hochflexibler Roboterkinematiken und KI-gestützter Industrialisierung von unausgereiften Fertigungs- und Wiederaufbereitungsprozessen entwickelt.
Autonomes Fahren ▼
Die Forschung konzentriert sich auf die Echtzeit-Wahrnehmung, Bewegungsplanung und -steuerung für selbstfahrende Fahrzeuge, einschließlich des Entwurfs einer ganzheitlichen Hardware-Software-Architektur für sicherheitskritische Anwendungen sowie Methoden zum Testen und Validieren. Diese Forschung umfasst am KIT eine enorme Bandbreite, die auch durch die Forschungsaktivitäten des KIT-Zentrums "Mobilitätssysteme" abgedeckt wird.
Technikfolgenabschätzung für autonome Systeme und Robotik ▼
Die Forschungsaktivitäten in diesem Themenbereich gehen einher mit einer ernsthaften Abwägung der ethischen, rechtlichen und sozialen Implikationen von Robotik und autonomen Systemen im Hinblick auf deren Akzeptanz in der Gesellschaft. Diese Abwägung betrifft z. B. die Forschung zur Wearable Robotics sowie zum autonomen Fahren.
YouTube-Kanal der Forschungsgruppe Hochleistungs-Humanoide Technologien (H²T)
To the Youtube Channel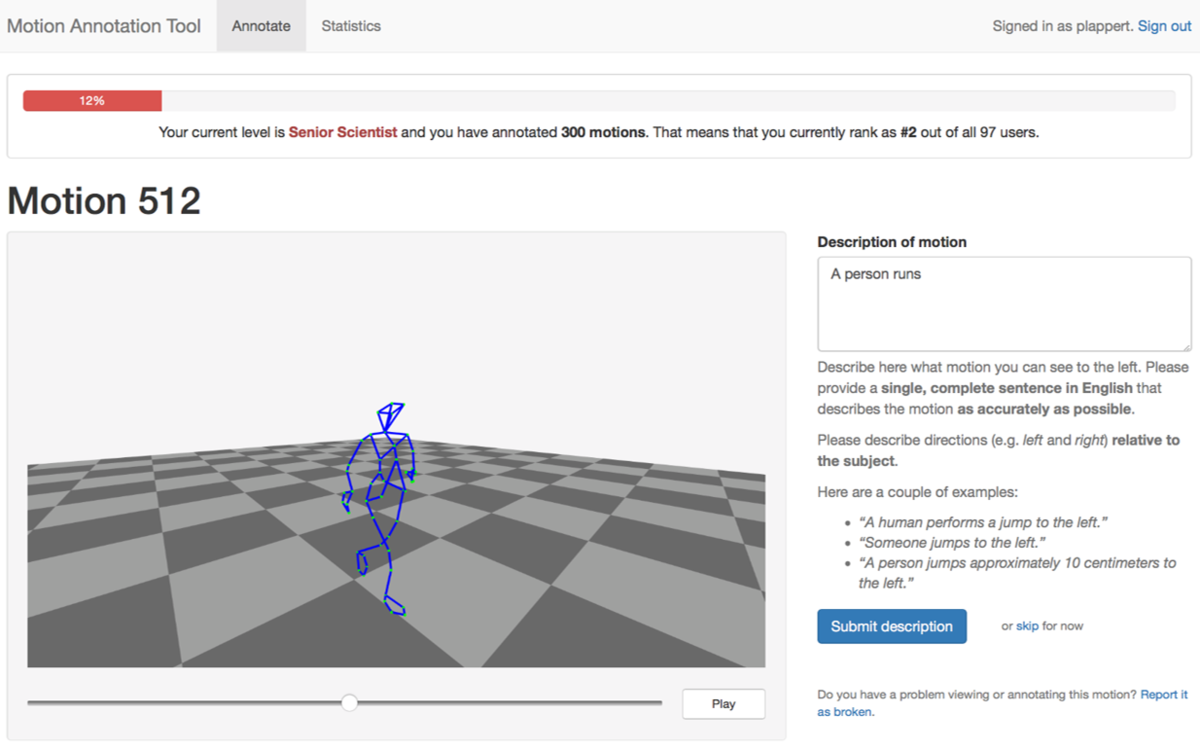
Mit dem Motion-Language-Datensatz des KIT wollen wir einen offenen, groß angelegten Datensatz mit natürlichsprachlichen Annotationen bereitstellen.
Link to the database