
Robotics and Automation
Robotics is one of the strategic technologies of the 21st century, which will provide solutions for many societal challenges and maintain the competitiveness of key industries.


 was featured at the virtual results conference of the high-tech forum on April 21, 2021. Video starts at 1:08:35.")
Through integrated research activities across topics within KCIST and disciplines at KIT, we are conducting research and developing robotic technologies for service applications, manufacturing, mobility and healthcare to improve everybody’s quality of life.
The major research activities range from assistive robotics, collaborative robotics, and cognitive robotics to robot perception, robot programming by demonstration, grasping, dexterous and mobile manipulation to industrial robotics, process control and automation. Our goal is to develop robotic systems with advanced capabilities regarding intelligent sensing, advanced motion control, safe interaction, intuitive programming and performance.
Major Projects:
The goal of SecondHands is to design a robot that can offer help to a maintenance technician in a pro-active manner.
To the Project-Website
In the Transregional Collaborative Research Center Invasive Computing (abbr. InvasIC), we are investigating a novel paradigm for the design and resource-aware programming of future parallel computing systems.
To the Project-WebsiteFor more projects see our partner's website
Events:
| November 20, 2019 | European Robotics Week: Open day at IAR-H2T and IAR-IPR |
| November 21, 2018 | European Robotics Week: Open day at IAR-H2T and IAR-IPR, German only |
| November 21, 2018 | European Robotics Week: Open day at IAR-H2T and IAR-IPR, German only |
| September 25 - 28, 2016 | International Workshop Robotics in the 21st century: Challenges and Promises |
Press reports:
| Roboter Armar 6 hört auf Befehle und hilft aus (21.03.2019, on the occation of the visit of the governor of Upper Austria at KIT, German only) |
| Mobilität zum Anziehen (12.07.2018, German only) |
| Wie Roboter dem Menschen ähnlicher werden (21.03.2018, German only) |
| ARMAR-6 in the Press |
| A New Open Source Dataset Links Human Motion and Language (09.02.2017) |
| Humanoids 2016: Kommen Roboter ohne Gehirn besser zurecht? (17.11.2016, German only) |
| Robotik: Selbstlernende Kooperationspartner (29.09.2016, German only) |
| Mensch-Roboter-Interaktion: Die Semantik der menschlichen Handlungen (26.09.2016, German only) |
YouTube channel of the research group High Performance Humanoid Technologies (H²T)
To the Youtube Channel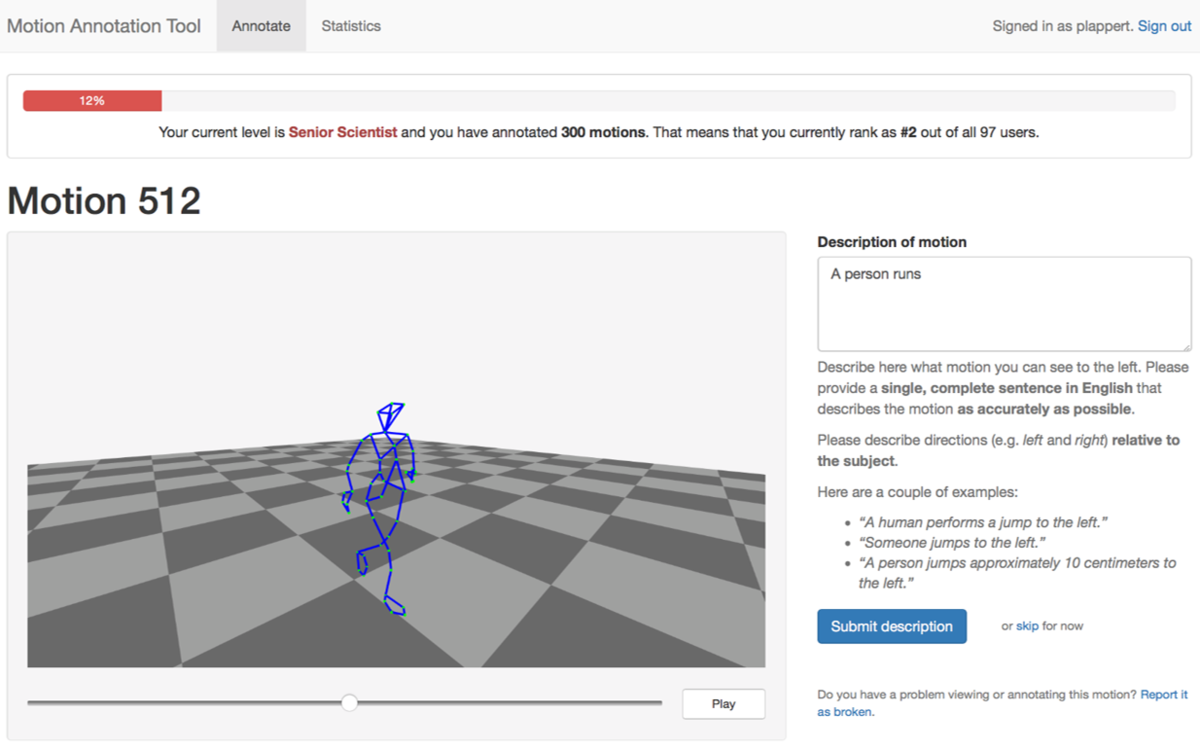
With the KIT Motion-Language Dataset, we aim to provide an open large-scale dataset of natural language annotations
Link to the database